
- Какво е честотна конверсия
- Избор на двигател
- Получаване на магнитно поле
- Индустриални честотни задвижвания
- Предимствата на използването на честотни преобразуватели
- Векторна и честотна регулация
- Техническо изпълнение на инвертора
- Принципът на регулиране на скоростта
 Доста често много хама или просто бизнесмени трябва да контролират скоростта на трифазен двигател. За това няма смисъл да се използва банален регулатор на мощността, защото той е изграден на принципа на промяна на напрежението и все пак, както знаете, двигателите на променлив ток не искат да се регулират по този начин, дори еднофазни.
Доста често много хама или просто бизнесмени трябва да контролират скоростта на трифазен двигател. За това няма смисъл да се използва банален регулатор на мощността, защото той е изграден на принципа на промяна на напрежението и все пак, както знаете, двигателите на променлив ток не искат да се регулират по този начин, дори еднофазни.
Оборотите, разбира се, ще се променят, но само в малка и почти незабележима граница, след което при достигане на долния праг и при подаване на 220 V при 150 V оборотите спират напълно. Ако валът също трябва да получи нормален момент, например, когато регулира скоростта на транспортьора или летвата, в зависимост от това към какво е свързан, тогава е подходящ само честотен преобразувател.
Какво е честотна конверсия
 Под концепцията за честотно преобразуване и след това честотния преобразувател трябва да разбираме цялата система, която прави нещо. А именно, той преобразува честотата на захранващата намотка на асинхронен двигател с напрежение. Тоест фокусираме вниманието ви върху факта, че тук не се променя напрежението, а неговата честота. В този режим на управление моментът на вала на двигателя се поддържа, когато скоростта на въртене се промени.
Под концепцията за честотно преобразуване и след това честотния преобразувател трябва да разбираме цялата система, която прави нещо. А именно, той преобразува честотата на захранващата намотка на асинхронен двигател с напрежение. Тоест фокусираме вниманието ви върху факта, че тук не се променя напрежението, а неговата честота. В този режим на управление моментът на вала на двигателя се поддържа, когато скоростта на въртене се промени.
Но за да направите честотен преобразувател със собствените си ръце, трябва да запомните дизайна и възможните характеристики на работата на асинхронните двигатели. Освен това, решавайки специално производство на такова устройство, първата стъпка е да се намери подходящ за параметрите двигател, който да се справи с работата, възложена му като част от готовия комплекс.
Избор на двигател
За да проектирате домашен chastotnik, първо трябва да запомните какво е асинхронен двигател и как работи. Несинхронен двигател или DPT е механично устройство, състоящо се от статор с полеви намотки и ротор. Вторият компонент може да бъде:
 късо съединение, тоест средните проводници са свързани в краищата с пръстени, а самите те са дебели и къси, поради което дизайнът се нарича "колело на катерица";
късо съединение, тоест средните проводници са свързани в краищата с пръстени, а самите те са дебели и къси, поради което дизайнът се нарича "колело на катерица";- фаза, роторът има няколко намотки, които са свързани към хлъзгащите пръстени, използвани за отстраняване на напрежението в режим на генератор.
Принципът на работа на двигателя е много прост и се състои във влиянието на въртящо се магнитно поле, създадено в статора, върху ротора на клетката-клетка, в който се появява ЕМП. Поради това в ротора започва да тече ток, което води до образуването на сили, взаимодействащи с магнитното поле на статора. В този случай скоростта на ротора и магнитното поле са неравномерни, поради което името е асинхронен двигател.
Разумно е да се предполага, че ако промените честотата на напрежението, подаващо статора, скоростта на ротора ще се промени. Всъщност, затова всички сериозни компании използват точно честотни преобразуватели за управление на такива двигатели. Когато проектирате верига на честотен преобразувател за електрически мотор със собствените си ръце, трябва да вземете предвид типа на двигателя и всички негови характеристики. По-специално мощност, брой полюси и максимална скорост на въртене. Можете да изтеглите готови схеми от онлайн списание "Radiocot" . Има ги много .
Получаване на магнитно поле
 За да се получи трифазно въртящо се магнитно поле, е необходимо да се премине ток през бобината на статора с необходимата честота, която ще бъде определена по формулата: iA = I m sinωt. В резултат на действието на този ток, MDS FA започва да действа по оста на завоя. Тъй като завоите в статора се редуват на фази, пулсацията ще има същия характер, създавайки обща пулсираща сила F, която е константа. Определя се като корен на квадратните сили в два завоя, изместени една спрямо друга под ъгъл от 90 ° С.
За да се получи трифазно въртящо се магнитно поле, е необходимо да се премине ток през бобината на статора с необходимата честота, която ще бъде определена по формулата: iA = I m sinωt. В резултат на действието на този ток, MDS FA започва да действа по оста на завоя. Тъй като завоите в статора се редуват на фази, пулсацията ще има същия характер, създавайки обща пулсираща сила F, която е константа. Определя се като корен на квадратните сили в два завоя, изместени една спрямо друга под ъгъл от 90 ° С.
В резултат на това възниква въртене на полето с ъглова скорост, изразено с формулата за всеки завой поотделно: ω = 2π f 1. Но за да се изчисли скоростта на полето в цялата машина, е необходимо да се вземе предвид общият брой двойки полюси, изразени със символа p. И тогава скоростта на полето ще бъде равна на: ω 0 = 2π f 1 / p. Съответно е възможно да се изчисли скоростта, изразена в rpm: n0 = 60 f 1 / p.
В допълнение към тези данни трябва да се помни, че характеристиките ще се различават от режима на празен ход, тоест при ω = ω 0, и при натоварване, когато ω ≠ ω 0. И също би било полезно да се припомни, че при натоварване такова нещо като плъзгане, което се появява поради изоставането на ω от ω 0. И се изразява като: s = (ω 0 - ω) / ω 0. Това предполага, че когато се изгражда ACS с увеличение на тази стойност, е необходимо автоматично да се промени честотата на напрежението в намотките за да се осигури стабилност на скоростта при различни натоварвания .
Индустриални честотни задвижвания
Всички индустриални двигатели осигуряват различни принципи за контрол на скоростта и момента на вала на индукционните двигатели, като променят не само честотата, но и фазовото изместване, времето на издигане на управляващите импулси, динамичното спиране и много други параметри. В същото време всичко това се извършва автоматично, без допълнително участие отвън. Следователно индустриалната верига на честотния преобразувател за трифазен двигател се състои от следните компоненти:
 Централният процесор, който действа като форма на главни и управляващи импулси.
Централният процесор, който действа като форма на главни и управляващи импулси.- Захранващ блок: токоизправител и в същото време управляващ блок, изграден върху IGBT - модули.
- Единица за въвеждане и извеждане на данни или просто интерфейс за взаимодействие с потребителя.
- Конвертор на шина за работа с програма за управление на програмата.
Трифазен двигател може да бъде оборудван със сензор, тогава е необходима обратна връзка. Сензорът може да бъде оптичен, индуктивен или магнитен. При двигателите с висока оборотна скорост скоростта се изчислява програмно въз основа на характеристиките.
Предимствата на използването на честотни преобразуватели
Не е за нищо, че хората започнаха активно да използват честотни преобразуватели във всички видове предприятия и дори в ежедневието, защото те са много по-икономични от колекторните мотори и могат да работят в условия, при които двигателят с четка бързо се разрушава. В допълнение към всичко това използването на честотен преобразувател даде възможност да се заменят механичните вариатори с задвижващи системи, което значително опрости дизайна на оборудването. И като се има предвид, че DPT практически не изисква ремонт по време на работа, използването на инвертора е просто идеалното решение.
Но трябва да се разбере, че има регулаторни ограничения, при които принципът за управление на индукционен двигател също ще се промени:
- При регулиране на скоростта в диапазон от 16: 1 или по-малко, е необходимо да се използва инвертор, работещ на честотната характеристика на волта.
- За регулиране в диапазон от 50: 1 трябва да се използва управление без сензор.
- В големи диапазони трябва да се използва обратна връзка с помощта на сензори или pid контролер, интегриран в инвертора.
Във всеки случай, когато се планира двигателят да се използва в тежки работни условия, което обикновено се случва, е по-добре да се използва векторно управление.
Векторна и честотна регулация
 За да се изгради висококачествена система с самоходно оръжие с асинхронно управление на двигателя, е необходимо да се разберат добре концепциите, а именно векторното регулиране или регулирането на честотата.
За да се изгради висококачествена система с самоходно оръжие с асинхронно управление на двигателя, е необходимо да се разберат добре концепциите, а именно векторното регулиране или регулирането на честотата.
Принципът на честотата се прилага в системи, където не е необходимо стриктно да се контролира оборотите, а дебитът, създаден от двигателя без значително натоварване, е важен. Но когато е необходимо да се осигури висок въртящ момент и добро сцепление от първия завой, трябва да се използва векторно управление.
Векторните самоходни пушки се използват и в проследяващи системи с ниска скорост на подаване. Например в машини за подаване на маса или опори на шпиндела. Тук не само е необходимо да се преодолее инерционността на леглото, но и да се осигурят необходимите усилия при обработката на частта.
Когато проектирате chastotnik за трифазен електромотор със собствените си ръце, е необходимо да вземете предвид вида натоварване, тъй като характеристиката на контролните превключватели на мощността също ще зависи от това, за да се постигне необходимата мощност с минимални загуби.
Техническо изпълнение на инвертора
Така стигаме до изграждането на схема за управление на индукционен двигател. И веднага трябва да се уверите, че почти всички производители на този тип датчици използват един и същи блок на веригата, който можете да използвате, за да проектирате свой собствен конвертор. И се състои от следните компоненти:
 Неконтролиран токоизправител трифазен 380 V или еднофазно мрежово напрежение 220 V.
Неконтролиран токоизправител трифазен 380 V или еднофазно мрежово напрежение 220 V.- DC автобус с вграден LC - филтър, състоящ се от набор от кондензатори, които осигуряват неговия стабилен заряд и елиминират пулсацията по време на скокове в мрежата.
- Инвертор на напрежение, който преобразува постоянно междинно напрежение в променливо напрежение с желаната честота. Снабден е с ШИМ за контрол на качеството.
- Асинхронен електродвигател, който се управлява.
Трябва да се каже, че производителите отдавна вървят към създаването на идеалната PWM, с която би било възможно стабилно да се контролира двигателят. И само с появата на IGBT модули стана възможно. Ето защо, за да създадете свой собствен преобразувател, се препоръчва да използвате ключове с напрежение най-малко 1200 V, като се вземат предвид възможните пулсации на мрежата и с добър запас на тока. На пазара е напълно възможно да се намерят транзистори и модули до 100 или повече А.
Опростена схема на блок конвертора ще изглежда така:
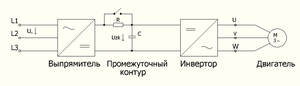
 Токоизправителят, връзката му се осъществява според принципа на едно- или двуфазна мостова верига. Той е предназначен да преобразува променливотоковото напрежение в постоянен ток, подходящ за по-нататъшно преобразуване на честотата от 0 Hz в главната честота. Междинната верига условно се състои от два блока:
Токоизправителят, връзката му се осъществява според принципа на едно- или двуфазна мостова верига. Той е предназначен да преобразува променливотоковото напрежение в постоянен ток, подходящ за по-нататъшно преобразуване на честотата от 0 Hz в главната честота. Междинната верига условно се състои от два блока:- Устройства за плавно зареждане на шината, за да не се повредят токозахранващите линии при зареждане на кондензатори. Нарича се баластна устойчивост.
- Блок кондензатори е филтър.
Изчисленото напрежение на междинната верига е √2 пъти по-голямо от U N. След достигане на необходимото постоянно ниво на напрежение в шината, резисторът се мостира от контактна двойка. Последният блок във веригата е инвертор. Това е крайният драйвер на изходните импулси, които след това се подават към двигателя, осигурявайки неговото въртене с дадена скорост.
Обобщената структура на захранващия модул е показана на следната фигура:
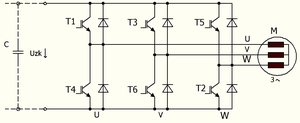
 За изграждането на инвертор се използват транзистори с висок ток, работещи в режим на чисто превключване. В процеса те са много горещи, така че се инсталират на големи радиатори с голяма площ на разсейване на топлината.
За изграждането на инвертор се използват транзистори с висок ток, работещи в режим на чисто превключване. В процеса те са много горещи, така че се инсталират на големи радиатори с голяма площ на разсейване на топлината.
За да проектирате верига за управление на инвертора, трябва ясно да си представите недостатъка на клавишите. За целта обърнете внимание на снимката по-долу:
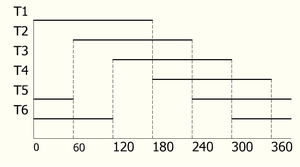
Показва интервалите от време за всеки от клавишите, инсталирани в този ред, както е показано на предишната фигура. Тоест във фаза U работят транзисторите Т1 и Т4, във фаза V - Т3 и Т6 и т.н. За всяка от намотките на двигателя купчина IGBT двойка. Когато конструирате инвертор за двигатели с малка мощност с ниски токове, можете да използвате прости биполярни или полеви транзистори.
Диаграмата на времето показва, че в първия момент от време транзисторите T1, T5 и T6 се отварят. Освен това транзисторът Т1 и Т6 продължават да бъдат отворени, докато Т5 се затваря и Т2 се отваря и така нататък. Тази диаграма напълно повтаря диаграмата на напрежението в трифазна мрежа, но само импулсите имат правоъгълна форма и имат зададена честота от контролера.
Резултатът е вид циклично превключване на транзисторите, докато токът във фазите се измества с 120 ° един спрямо друг. И за да получите контролно напрежение, състоящо се от много импулси, под формата на синусоидален сигнал с минимален брой хармоници, използвайте съотношението на включените и изключените транзистори.
За да се намалят до минимум загубите в двигателя, които обикновено възникват по време на опити за управление чрез намаляване на напрежението в намотките на двигателя, те прибягват до увеличаване на честотата.
Принципът на регулиране на скоростта
За да промените скоростта на въртене на вала на двигателя, е необходимо да промените честотата f 1, но това трябва да се направи внимателно. В края на краищата е необходимо токът на магнетизиране да се запази непроменен. За да се поддържа това равновесие, U 1 трябва да бъде пропорционален на f 1., но ако балансът е нарушен, токът на намагнитване или намалява, или нараства. Съответно, полето ще отслаби или пренасити. За да се гарантира това, характеристиката u / f се избира линейна, докато се достигне ъгловата честота. Тя възниква, когато напрежението върху намотките се повиши до максималната марка.