
- DPT устройство
- Класификация на двигателите PT
- Характеристики на работата на двигателите на клапаните
- Свойства без четки
- Структурата на стъпаловидното оборудване
- Принцип на работа
Произходът на идеята за двигателя с постоянен ток (DCT) се появява в началото на XIX век. Известните физици Алесандро Волта, М. Фарадей и П. Барлоу вкараха своето виждане за този процес в историята. Б. С. Якоби се счита за изобретател на електродвигател, тъй като той е бил този, който е успял да произведе устройство с въртяща се арматура, което би могло да се приложи на практика. Въпреки че първият двигател е с ниска мощност, следващият вече пуска лодката в движение.
 >
>
DPT устройство
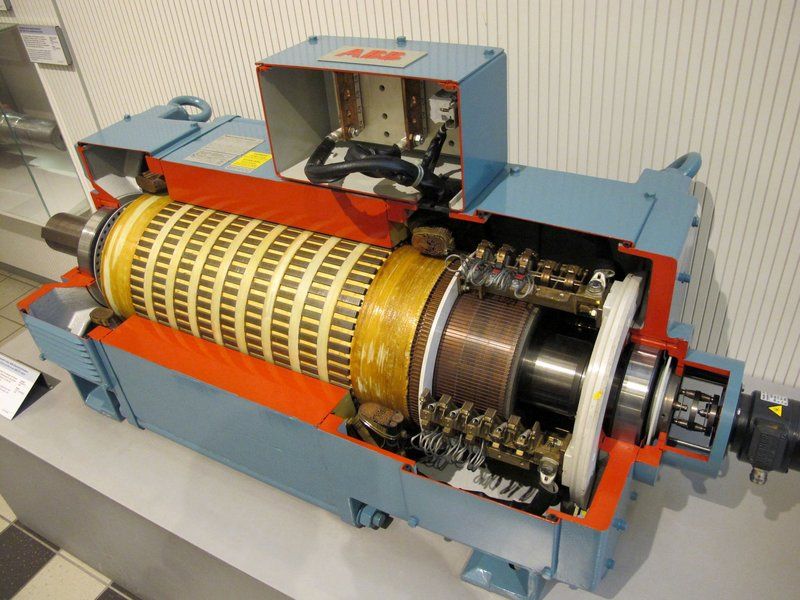
Основните части на електрическата машина с постоянен ток са магнити и намотки. Спомагателните части включват корпус, сърцевина, вал, колектор и механизъм с четка. Всички тези подробности имат своето предназначение.
Ядрата на подвижните и неподвижните части не са направени от холистична конструкция, а от листове от електрическа стомана. Тази структурна характеристика позволява практически да се елиминират вихровите токове.
Прякото задължение на колектора е превръщането на променлив ток, който се произвежда в намотката на арматурата, в постоянен. Колектор е единица, която е специфична за машини с постоянен ток. Но той е и най-уязвим, тъй като почти половината от всички електродвигатели се отказват по време на работа именно поради неговата повреда. Липсата на колектор в структурата на асинхронна или синхронна машина подобрява нейната надеждност. Това предимство остава както за трифазни, така и за еднофазни машини с променлив ток.
Управлението на постоянен двигател предполага промяна в скоростта на въртене, тъй като основната му задача е да приведе в движение работещите механизми. Скоростта на въртене може да бъде променена по три начина:
- промяна в напрежението, което се подава;
- промяна в съпротивлението в веригата на арматурата;
- промяна в магнитния поток в веригата на възбуждане.
Класификация на двигателите PT
Разликите между видовете електродвигатели са във вида на магнитите и метода на възбуждане. Магнитите могат да бъдат постоянни или електромагнити. Предимства на постоянен магнит (за разлика от електромагнита):
- компактност;
- Не изисква източник на енергия за работа.
Недостатъците са невъзможността да се регулира силата на магнитния поток и демагнетизацията във времето.
Типът на възбуждане на DCB зависи от точката на свързване на полюсната намотка. В тази връзка те разграничават независимото възбуждане на двигателя (намотката на възбуждане се захранва от външен източник) и самовъзбуждане (намотката на възбуждане е свързана с намотката на арматурата). Самовъзбуждащите се двигатели имат по-кратки имена:
- шунт (паралелно свързване на намотките);
- сериен (серийна връзка на намотките);
- съединение (смесена връзка на намотките).
Електродвигателите се използват в различни области на промишлеността и селското стопанство, както и в битовите инсталации. Разнообразието им е голямо. Основните видове DPT:
- традиционна цел;
- специално предназначение.
Характеристики на работата на двигателите на клапаните
Клапанните двигатели принадлежат към електрически машини със специално предназначение. Те дължат името си на използването на устройства за изправяне на ток в тях - клапани. Предимства на вентилните електродвигатели:
- широка промяна на скоростта на въртене;
- по-висока ефективност поради намалени магнитни загуби поради ниско магнитно съпротивление;
- дори при пиково натоварване, представянето е доста добро.
Наред с предимствата, те имат и някои недостатъци. Но стойността им не е голяма. Основните от тях са:
- шум;
- мениджмънтът изисква определена квалификация на персонала;
- висока цена.
 Приложенията им са различни: в производството на петрол, в химическата промишленост и в сондажите.
Приложенията им са различни: в производството на петрол, в химическата промишленост и в сондажите.
Основната разлика между вентил и конвенционален двигател е дизайнът. Вентилът няма някои от обичайните части на конструкцията: колектора и механизма на четката. Вместо това е инсталиран превключвател (инвертор), с помощта на който се управлява двигателят на клапана. Инверторът получава сигнал от сензора за положение на ротора.
Сензорите за положение на ротора могат да бъдат трансформаторни или индуктивни безконтактни елементи. Най-често срещаните са електромоторни сензори за ефект на Хол. Такова устройство се състои от малка плоча от полупроводников материал. На него са контактните връзки, към които са свързани проводниците, свързани към източника на захранване. Изходите на изходния сигнал също са споени към съответните връзки на табелата. Изискванията към сензорите за положение на ротора са:
- компактност;
- минимална стойност на входната мощност;
- висока кратност на сигнала, максимална и минимална;
- надеждна работа при всякакви условия на околната среда.
 Превключвателят е направен на полупроводници. Задачата му е подобна на задачата на четко-колекторния агрегат в конвенционалните двигатели и се състои в промяна на посоката на тока. На основата на леглото е разположена намотка на котва, а върху ротора е разположен постоянен магнит. Този дизайн елиминира възможността за приплъзване на приплъзване на котвата.
Превключвателят е направен на полупроводници. Задачата му е подобна на задачата на четко-колекторния агрегат в конвенционалните двигатели и се състои в промяна на посоката на тока. На основата на леглото е разположена намотка на котва, а върху ротора е разположен постоянен магнит. Този дизайн елиминира възможността за приплъзване на приплъзване на котвата.
Клапанният двигател има ток в синусоидални фази. Възбуждането може да бъде от два вида:
- електромагнитно;
- magnetoelectric.
С електромагнитно възбуждане полевата намотка се намира на полюсите. Той е свързан към мрежата благодарение на хлъзгащи пръстени, поставени на вала на ротора. Така създаването на магнитно поле става с електромагнитни средства.
В случай на магнитоелектрично възбуждане няма да има плъзгащ се контакт във възбудителната верига или в котвата на котвата. Постоянните магнити ще действат като полюси. Тези мотори се наричат безчеткови двигатели.
Свойства без четки
 Безчеткови постояннотоков двигател (BDTT) значително се различава от двигателя на клапана. Токът му във фази изглежда трапецовиден. BDTT се подрежда по-просто: импулсно-широчината модулация се заменя с превключване на 120 или 180 градуса. Основните задачи на безчетковия мотор са точното положение на ротора в необходимия интервал и висока скорост на въртене.
Безчеткови постояннотоков двигател (BDTT) значително се различава от двигателя на клапана. Токът му във фази изглежда трапецовиден. BDTT се подрежда по-просто: импулсно-широчината модулация се заменя с превключване на 120 или 180 градуса. Основните задачи на безчетковия мотор са точното положение на ротора в необходимия интервал и висока скорост на въртене.
Дизайнът може да бъде от два вида: с магнити върху подвижната част (котва) или неподвижен (статор). Автоматични устройства за охлаждане използват задвижващи устройства с дизайн на закотвени магнити. Тяхната характерна черта е бързото постигане на висока скорост.
 В системите за медицинско оборудване поставянето на магнити върху статор е често срещано. Тези микромашини се наричат двигатели с висок въртящ момент. Скоростта им на въртене не е толкова голяма, но поради липсата на намотка на възбуждане и наличието на постоянни магнити, те вършат добра работа с претоварването и поддържат точността на позицията в пространството.
В системите за медицинско оборудване поставянето на магнити върху статор е често срещано. Тези микромашини се наричат двигатели с висок въртящ момент. Скоростта им на въртене не е толкова голяма, но поради липсата на намотка на възбуждане и наличието на постоянни магнити, те вършат добра работа с претоварването и поддържат точността на позицията в пространството.
Сигналът към намотките на такива електрически машини ще идва от водача, чиято задача е да контролира въртящия момент. За да може котвата да се завърти под определен ъгъл, е необходимо да се приложи напрежение към необходимите намотки. Гладкостта на въртене не може да се поддържа, но може да се постигне висока скорост на въртене.
Разликата между колекторните и безчетковите двигатели е както в конструкцията, така и в работата. Колекторните мотори не се нуждаят от контролер, но работата на безчетков мотор без неговото участие е неприемлива. Предимства на безчетковите двигатели:
- способността за работа в условия с различни характеристики на околната среда;
- дълъг срок на употреба;
- надеждност в работата.
 Недостатъкът е цената. Той е доста висок поради наличието на полупроводников превключвател, постоянен магнит и чувствителни елементи в конструкцията.
Недостатъкът е цената. Той е доста висок поради наличието на полупроводников превключвател, постоянен магнит и чувствителни елементи в конструкцията.
Сглобяването на клапан или DPT със собствените си ръце е неблагодарна задача. Материалите, сложността на работата и изразходваното време ще бъдат много по-скъпи от парите, изразходвани за закупуване на фабричен двигател. Но надеждността и безопасността също ще бъдат няколко пъти по-високи.
Изборът на тези електрически машини трябва да се извърши въз основа на характеристиките на водачите с импулсно-широчинни канали за модулация:
- краен стрес при продължителна употреба;
- максимална скорост на въртене;
- допустима сила на тока;
- текуща честота (обикновени устройства 7-8 kHz, по-модерни модели - 16-32 kHz).
 Основните връзки в управлението на безчетков мотор са сензори за положение. Сигналът от тях се предава на контролера и в резултат на това става превключване. Но работата на тези устройства без сензори е възможна. В този случай падането на напрежението през намотката играе роля, което в даден момент е неработещо.
Основните връзки в управлението на безчетков мотор са сензори за положение. Сигналът от тях се предава на контролера и в резултат на това става превключване. Но работата на тези устройства без сензори е възможна. В този случай падането на напрежението през намотката играе роля, което в даден момент е неработещо.
По броя на фазите много двигатели са трифазни, а за да ги управлявате, е необходим допълнителен възел в устройството - постоянен токоизправител в трифазен импулс. Управлението на трифазен безчеткови постояннотоков двигател също създава известни затруднения поради паралелното управление на няколко параметъра. Тъй като електрическите машини на устройството са обратими, безчетковият мотор може да бъде свързан като генератор.
Структурата на стъпаловидното оборудване
Разнообразие от двигатели за променлив ток със специално предназначение са стъпкови двигатели. Те понякога се наричат импулс. Те се отнасят за синхронни електродвигатели за специални цели. Принципът на тяхното действие е, че стъпаловидни стъпки на изхода се получават поради импулси на напрежението на входа. Видове стъпкови двигатели по тип ротор:
- развълнуван;
- реактивен.
Структурата на устройството с активен ротор предполага наличието на електромагнити или постоянни магнити в него. При двигатели с реактивен ротор няма полева намотка. Роторът е изработен от мек магнитен материал.
Управляващата намотка е разположена върху неподвижната част - статора. Според броя на фазите може да бъде различен, но най-често срещаните са трифазни намотки.
Принцип на работа
 Ако стъпковият двигател на статора има две двойки полюси с две контролни намотки, тогава неговото въртене ще зависи от подаването на напрежение към контролната намотка. Когато се приложи сигнал към контролната намотка, която е разположена на първата двойка, роторът ще се обърне и ще заеме позиция по оста си. Когато се появи сигнал върху намотката на втората двойка полюси, роторът ще трябва да заеме положение между тези полюси.
Ако стъпковият двигател на статора има две двойки полюси с две контролни намотки, тогава неговото въртене ще зависи от подаването на напрежение към контролната намотка. Когато се приложи сигнал към контролната намотка, която е разположена на първата двойка, роторът ще се обърне и ще заеме позиция по оста си. Когато се появи сигнал върху намотката на втората двойка полюси, роторът ще трябва да заеме положение между тези полюси.
Когато сигналът е изключен върху намотката на първата двойка, а останалият сигнал върху контролната намотка на втората двойка полюси, роторът ще се върти по оста им. По този начин, докато се върти, изглежда ще предприеме стъпки, поради което носи такова име. Стъпките на двигателя (ъгъл на въртене на ротора) с две двойки полюси ще бъдат равни на 45 градуса. Системата за превключване ще бъде четиритактова.
За система за превключване с издърпване с един и същ брой полюсни двойки е необходимо сигналът винаги да достига само до една специфична контролна намотка на конкретна полюсна двойка. Тогава ъгълът на въртене на ротора ще се промени и ще бъде 90 градуса.
За да бъде принципът на работа на стъпковия мотор беше ясен дори за манекени, трябва да обърнете внимание на схемата.

Роторът ще заеме място в пространството срещу двойката полюси, на намотката на която ще се захранва. Ако две мощност се подават към намотките на съседни полюси, роторът ще заеме положение между тях. Колкото по-малка е стойността на стъпката на двигателя, толкова по-точна и по-стабилна е неговата работа.
Стъпковият мотор изисква превключване. Задачата му е да превърне управляващите импулси от определена последователност в правоъгълни импулси в система с необходимия брой фази.
При голямо натоварване на двигателя точността на въртене на ротора ще бъде нарушена. Той ще се върти с известно закъснение, което е ъгълът на статичната грешка. Когато стъпковият двигател работи на празен ход, стойността на ъгъла на статичната грешка е нула.
Тъй като скоростта на процесите е обратно пропорционална на съпротивлението на управляващите намотки, тогава за да се ускори въртенето на ротора, се използват резистори. Те са свързани последователно към веригата на намотката за управление на статора. Оценете ефективността на работата по основния индикатор - стойността на входната мощност.