
- Разлика и разновидности на стъпкови двигатели
- Дизайн и принцип на работа
- Методи за фазов контрол
- Методи за контрол на стъпкови двигатели
- Микростепенен режим на задвижване
 Стъпковият мотор е електромеханично устройство, което преобразува електрически сигнали в дискретни ъглови измествания на вала. Използването на стъпкови двигатели позволява на работните тела на машините да правят строго дозирани движения с фиксиране на позицията им в края на движението.
Стъпковият мотор е електромеханично устройство, което преобразува електрически сигнали в дискретни ъглови измествания на вала. Използването на стъпкови двигатели позволява на работните тела на машините да правят строго дозирани движения с фиксиране на позицията им в края на движението.
Използват се в CNC машини, роботика, където се изискват дискретни движения, фиксиране на позицията и ниска скорост.
Разлика и разновидности на стъпкови двигатели
По принципа на работа те са по-близо до двигателите с постоянен ток. Конструкцията на електродвигатели непрекъснато се усъвършенства, за да намали разходите за труд в производството, да увеличи ефективността и да увеличи броя на оборотите. В сравнение с DC мотор, те нямат четки, колектор и намотки с по-малко завои.
Сред първите двигатели е създаден миниатюрен двигател за часовник и кръстен на френския инженер Мариус Ловет. Статорът е изключен в краищата или в областта на ротора има малки стеснения. Ротор с диаметър 1, 5 мм, магнитен на базата на кобалт. Една намотка в един ред мощност 1, 5 волта. Ъгълът на въртене е 90 градуса.
Лаветният мотор се използва и в медицината за изпомпване на различни течности, а също така често се използва и в смесители и смесители.
В последно време се разработва пиезоелектрически двигатели, използващи пиезомагнитния ефект и използващи феромагнитни материали в конструкцията. Подобряват се линейните двигатели, при които валът не се върти, а извършва линейни движения. За прецизно механично оборудване руските производители произвеждат двигатели със серийна маркировка:
 LH.
LH.- DSHR.
- DSHG.
- DSHL.
- SM.
- DSHE
Такива предприятия като NPO ATOM, ZETEK, компания Elektroprivod, Stepmotor, Vekson, NPO RIF, Saratov el. механичен, VNIIEM Corporation, ЗАО Uralelectromash, ARC Energoservice. Чуждестранни компании: Filling motor, Autonics, Motionking YUHA motor, Jlangsu, Phytron и други се занимават с производство на моторни задвижвания FL 203, FL 28, FL 57, 35 HS, 57 HS, 17 HD. Обхватът на произвежданите моторни задвижвания е разнообразен: по размер, мощност, с вградена скоростна кутия и табло за управление.
Дизайн и принцип на работа
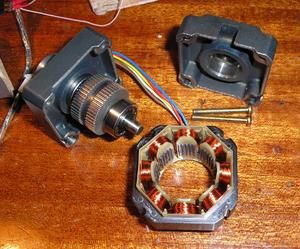
 Стъпковият мотор се състои от статор и въртящ се ротор. Ядрото на статора е направено под формата на набор от листове от електрическа стомана (щамповани). Това намалява вихровите токове и следователно нагряването. Статорът е разделен по периферия на 4.6.8 надлъжни канали. Прилага се и други. Върху издатините между каналите са намотки под формата на намотки. Броят на слотовете съответства на броя на моторните полюси. Колкото повече полюси, толкова по-малък е ъгълът на въртене на ротора, тоест стъпката.
Стъпковият мотор се състои от статор и въртящ се ротор. Ядрото на статора е направено под формата на набор от листове от електрическа стомана (щамповани). Това намалява вихровите токове и следователно нагряването. Статорът е разделен по периферия на 4.6.8 надлъжни канали. Прилага се и други. Върху издатините между каналите са намотки под формата на намотки. Броят на слотовете съответства на броя на моторните полюси. Колкото повече полюси, толкова по-малък е ъгълът на въртене на ротора, тоест стъпката.
Роторът се състои от един или два постоянни магнита, с краища, металните плочи на които са фиксирани със зъби. В този случай плюсовете S и N на постоянния магнит са разделени на n полюса, което съответства на броя на зъбите. Той също влияе върху величината на стъпката на въртене. Според дизайна на ШД се произвеждат три вида в зависимост от дизайна на ротора:
- реактивен;
- постоянен магнитен ротор;
- Hybrid.
 Реактивен - роторът е изработен от феромагнетичен материал с надлъжни канали, стълбове. Той се използва рядко, само за прости задачи. Главно поради факта, че той няма заключващ момент. Хибриден - роторът е направен от две половини от феромагнитен материал, с надлъжни канали и между тях е разположен постоянен магнит. Жлебовете на половинките една спрямо друга се изместват под малък ъгъл, за да се намали стъпката. Най-често се използват.
Реактивен - роторът е изработен от феромагнетичен материал с надлъжни канали, стълбове. Той се използва рядко, само за прости задачи. Главно поради факта, че той няма заключващ момент. Хибриден - роторът е направен от две половини от феромагнитен материал, с надлъжни канали и между тях е разположен постоянен магнит. Жлебовете на половинките една спрямо друга се изместват под малък ъгъл, за да се намали стъпката. Най-често се използват.
При подаване на импулсно напрежение към намотката на статора се генерира електромагнитно поле. Взаимодействието с най-близкия полюс на постоянния магнит създава въртящ момент. Валът на двигателя се върти под определен ъгъл. Ъгълът на въртене зависи главно от броя на полюсите на ротора.
Такъв двигател ще бъде наречен стъпков. Поради малкия си размер, WD серия Em 422 се използва в матрични принтери.
Методи за фазов контрол
Управлението главно зависи от броя на полюсите и конфигурацията на намотките на статора. SD се произвеждат основно със следните намотки:
- Две намотки с 4 пина.
- Две намотки с 6 проводника със среден терминал.
- Четири намотки - 8 заключения.
 Можете да контролирате два метода, да използвате еднополярно напрежение - еднополярно или биполярно - биполярно. Униполярният стъпков мотор има 4 полюса и 2 намотки. В четирифазна всяка намотка е разделена наполовина и е разположена на противоположни полюси. Въртенето се осъществява чрез редуване на напрежение към намотките. С 6 извода или 5, също 2 намотки, но с кран от средата. Обикновено средните проводници на бобината са свързани заедно с отрицателния проводник, а положителните чрез управляваните клавиши се подават към намотките.
Можете да контролирате два метода, да използвате еднополярно напрежение - еднополярно или биполярно - биполярно. Униполярният стъпков мотор има 4 полюса и 2 намотки. В четирифазна всяка намотка е разделена наполовина и е разположена на противоположни полюси. Въртенето се осъществява чрез редуване на напрежение към намотките. С 6 извода или 5, също 2 намотки, но с кран от средата. Обикновено средните проводници на бобината са свързани заедно с отрицателния проводник, а положителните чрез управляваните клавиши се подават към намотките.
Биполярните двигатели имат 4 намотки, по 2 за всяка фаза. Контролът възниква, когато се промени полярността на намотката. С този контрол схемата на свързване на стъпковия мотор е сложна, но въртящият момент се получава повече. Основните характеристики са захранващото напрежение, консумираният фазов ток, стъпка, мощност и размер на фланеца. Седалките са стандартизирани и са обозначени, например, като 23. Това съответства на разстоянието между отворите за монтаж 57 mm.
Методи за контрол на стъпкови двигатели
 Използването на моторни задвижвания в машини с ЦПУ се конкурира само със серво задвижвания, например в ерозионни машини или принтери, те дори ги надминават по техническите си възможности, разходи и прости схеми за управление. Управлението може да се извърши на цифрови микросхеми, специализирани - A3977, на програмиран PIC16, чрез клавиши или SMSD 1.5 драйвери.
Използването на моторни задвижвания в машини с ЦПУ се конкурира само със серво задвижвания, например в ерозионни машини или принтери, те дори ги надминават по техническите си възможности, разходи и прости схеми за управление. Управлението може да се извърши на цифрови микросхеми, специализирани - A3977, на програмиран PIC16, чрез клавиши или SMSD 1.5 драйвери.
Повечето драйвери се управляват от компютър чрез RS-232, USB и LPT портове. Те генерират управляващи сигнали: стъпка, посока, разделителна способност и осигуряват ½ стъпка разделяне до 1/32 и работят с програми: MACH3, KCam, DeskCNC, Turbocnc и други. Свържете двигателя към драйвера с кабел, както е описано. След като изучихте работата на програмата, не е трудно да започнете работа. За включване се използва напрежение от 5 волта до 48 волта. Изключение правят двигателите 220/110 волта .
Микростепенен режим на задвижване
Основното време на работа на стъпковия мотор е в режим стъпка по стъпка или полу-стъпка, а при стартиране и спиране е препоръчително да се използва режим на микро стъпка за прецизно фиксиране. Режимът стъпка по стъпка се определя от дизайна и контрола на импулса. По време на микроспирането към намотките се прилагат синусоидални напрежения с желаното фазово изместване.
Роторът е фиксиран в определено съотношение на фазите на токовете в намотките. Изчисляване на равновесната точка по формулата x = S * pi / 2 * arctan a / b, където:
- a е моментът, създаден от първата фаза, и b е втората фаза;
- x е равновесната точка на ротора или микростъпа в радиани;
- S е ъгълът на стъпката.
 И също така е необходимо да се вземе предвид максималната честота на управляващия сигнал, при която няма загуба или добавяне на допълнителна стъпка по време на работа. Той е основният индикатор за преходния режим на стъпковия мотор и е посочен в характеристиките като честотата на отзивчивостта на двигателя.
И също така е необходимо да се вземе предвид максималната честота на управляващия сигнал, при която няма загуба или добавяне на допълнителна стъпка по време на работа. Той е основният индикатор за преходния режим на стъпковия мотор и е посочен в характеристиките като честотата на отзивчивостта на двигателя.
По време на работа е необходимо да се следи чистотата около задвижването и да се предотврати навлизането на метални стружки, възможно е отказ на задвижването на двигателя. Намерете начин да защитите устройството. Ремонтът е подобен на ремонт на мотор на комутатор, той изисква точност.
След разглобяване вземете и издухайте статора със сгъстен въздух и избършете ротора с парцал. Проверете за изпускане на лагера.